Wir stellen hier vollständig neue Greifersysteme zum Greifen und Einfangen sowie zum Ordnen und Sortieren von Teilen vor. Die Greifer können von Roboterarmen bewegt werden und eignen sich besonders zum Greifen bewegter Teile, dort wo die Teile keine genaue Abgriffsposition haben.
Konstruktionen aller Art
Erfahrung und Kompetenz
Faires Preis-Leistungs-Verhältnis
Erfahrung und Kompetenz
Faires Preis-Leistungs-Verhältnis

Telefon: 0049 2405 408 16 50
Fächergreifer
Fächerwinkelgreifer zum zentrischen vorpositionieren und greifen runder Teile. Öffnen- und Schließbewegung.
Fächerparallelgreifer zum zentrischen vorpositionieren und greifen runder zylindrischer Teile. Öffnen- und Schließbewegung.
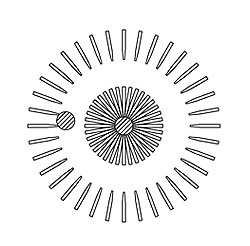
Das Bild zeigt die Fächer eines Fächergreifers in der Aufsicht. Zu sehen sind zwei kreisförmige Anordnungen von Fächern im geöffneten und im geschlossenen Zustand (Greifposition).
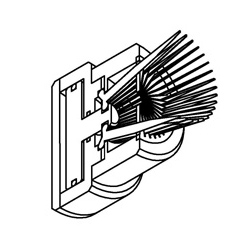
Fächerwinkelgreifer in ISO-Metrischer Darstellung (geöffnet).
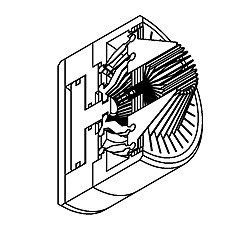
Fächerparallelgreifer in ISO-Metrischer Darstellung (geöffnet).

Haben Sie noch Fragen oder benötigen weitere Infos?
Wir helfen Ihnen gerne weiter. Sie können uns über unsere Kontaktseite erreichen oder tel. unter 02405 408 16 50.

Fachbericht als PDF-Datei
Bei Interesse senden wir Ihnen den gewünschten Fachbericht als PDF-Dokument zu. Nutzen Sie zur Anfrage hierzu unsere Kontaktseite.

Zum Patent angemeldet
Diese Produkt wurde zum Patent angemeldet.